

How To Be A Safe Drone Pilot | Learn This Or Suffer The Consequences

An essential part of becoming a competent builder, programmer and flyer of drones is doing so safely. It is said there are two types of multirotor pilots: those that have crashed and those that will. Many of us have had close calls – a vehicle out of control flying away or into a tree. Now imagine if it crashed by (or on) an innocent bystander. In this blog we will cover why safety matters and how to prepare for safe flights.
But before we start, at the end of this blog there is a safety quiz. Take it now if you want to test your safety profile before reading ahead. Answers are provided at the end of the quiz.
WHY IT MATTERS

It seems obvious that safety is important, yet for one reason or another we sometimes catch ourselves from a potentially unsafe situation. We should be diligent to ensure personal safety, public safety, safety to animals, as well as to avoid a complaint, criminal enforcement, fines, loss of privileges, liability, or a lawsuit, and the guilt that would result if you injured someone. Flyers that disregard safety also tarnish public perception about drones which could further tighten regulations.
DON’T BE THIS PILOT
Several years ago, someone in my neighborhood was flying his new DJI Phantom 4 in front of and over people, hovering right in front of my window. He later told me he even set up the drone to autonomously fly a mission beyond line of sight (BVLOS) which took 15 minutes before returning home. He was amazed how easy he did this.
Even worse, he did this within 5 miles of Class D airspace. He then professed to be a lawyer and told me he was thinking about going into “drone law”. Your new abilities come with new liabilities. This means, like in manned aviation, you are responsible for your actions and therefore responsible to learn how to avoid risky flight.
FIRST FLIGHTS
Before you initiate a first-time takeoff, mentally think what you want to do to optimize the experience. Re-calibrate the compasses in the new field location, re-check the hardware fittings and set up the build for initial tuning.
Your first test flights of a new build should be made low off the ground, away from any people or obstructions under manual control in non-GPS stabilize mode. Move the drone in the x-y plane, then exercise yaw control and finally move vertically and land. If you see any oscillations or vibrations stop the flight and re-assess your next approach which could involve looking at the log files, making hardware adjustments or re-setting the tuning parameters.
Next fly in Alt-Hold mode to assess barometric control for level flight. Again, exercise the drone in all axes and land. Finally, you can switch over to a GPS-guided mode such as Loiter and again evaluate moving to various locations. Consider using various tuning methods to optimize drone stability. Learn to download and evaluate your flight logs to recognize problems. All of these initial steps will set-up the drone for future safe flights.
RISK MANAGEMENT
So how do you manage risk? Let’s start with some basic definitions.
Harm – Physical injury or damage to the health of people, or damage to property or the environment.
Hazard – Potential source of harm
Hazardous situation – Circumstance in which people, property, or the environment are exposed to one of more hazard(s).
Risk – The combination of the probability or occurrence of harm and the severity of that harm.
Risk control – process in which decisions are made and measures implemented by which risks are reduced to, or maintained within, specified levels
This can be diagrammed as follows (with example).
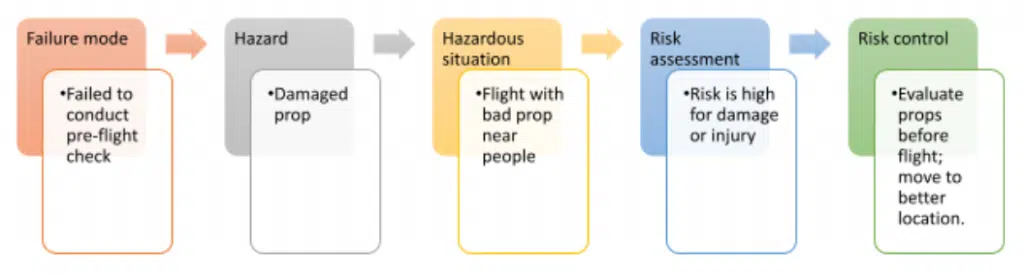
For example, using an unsecured prop is a hazard. Flying the drone near people would be a hazardous situation since the prop could fly off and the drone would crash. The risk then would depend on the probability of the drone crashing, causing injury or damage. Flying at a large empty field would be significantly less probable of causing harm than flying near obstacles. Conducting a pre-flight inspection would exclude a bad prop.
Another example would be testing new code. What could go wrong?! How about a flyaway into the wild blue, or worse yet, into a crowded street with playing kids? Here are some ideas for ensuring you have ‘safe code’:
- Run through each new line and ask yourself what it means and what it does. If you don’t know, could it cause a hazardous situation? How does it compare with the program before you modified it?
- Instead of a mission of many waypoints, how about testing the new code for just one close waypoint? Then open it up in steps.
- Evaluate the code in simulation. Simulation allows you to basically test it out under any harsh conditions without risk.
- On first flight, leash the copter so you have control of a flyaway.
- Ensure you understand how to take manual RC control.
Engineers sometimes conduct what is known as Failure Mode and Effects Analysis (FMEA) to assess what could happen if a component were to fail. This could be due to a damaged component, or perhaps how you built it. One could run through a checklist of each vehicle component and ask yourself, what would happen if this were to fail? What if I lose radio telemetry or GPS or RC control? What if battery power becomes low? Are the solder connections good? What is the probability and severity of harm, damage, or inconvenience if this occurs?
Next you would ask how could I mitigate, ie, lower the risk?
A loose or damaged prop is of course avoidable, and an easy item for your safety checklist. My what? Oops.
A SAFETY CHECKLIST
Both mental and written checklists are advisable to ensure you haven’t excluded any important considerations before a flight, both for safety and convenience reasons. I hate driving out to a field only to find I’ve forgotten a radio antenna. And I really would hate starting a grass fire without a fire extinguisher nearby!
Some things you would check before leaving home or the office, whereas others you would assess at the field. So based on the previous discussion, what would your checklist look like? Compile and organize your thoughts in writing and make it a habit to check before each flight. A checklist might include –
The pilot –
- Adequately trained for intended flight?
- Health and fit to fly?
The environment –
- Weather – wind gusts, rain, temperature
- Field conditions – surface, standing water, people, trees, power lines
- Airspace – legal to fly?
- Animals, birds
The vehicle(s) –
- Firmware up to date
- Props secure
- Charged batteries
- Charged laptop
- Charged transmitter
- Radio antennas
- Frame secure, nuts tightened
- Voltage monitoring operational
- Transmitter modes set, including Emergency Stop
- GPS secure and in line with autopilot
- Recalibration of the compass in the field
- Set a transmitter switch to RTL or RTH
Miscellaneous –
- Paperwork for permissions, licenses, etc up to date
- Fire extinguisher
- Fluids/ice
- Sunscreen, bug spray
- Medications, first aid kit
- Tools
- Cell phone
- Weight with cord
- Logbook – Important to take notes after each flight
Other safety precautions that can be taken include –
- Fencing – A Mission Planner GPS feature whereby you can set a virtual boundary your vehicle will not cross.
- Failsafe – Failsafe actually is a very important setting if RC signals are lost and is set up with your transmitter and receiver. Failsafe is also set in Mission Planner in the event power becomes minimal and would trigger an RTL event.
- Emergency Mode settings – These can be set with an RC switch to not only trigger an immediate LAND mode, but also to turn the motors off to stop a flyaway.
- Simple and Supersimple flight modes – These are helpful settings for when you are learning to manually control your copter and might advert a crash.
- Logging – Ensure you have activated logging so you can evaluate critical elements of the drone for post-flight analysis. This might help prevent a similar failure.
- Tuning – Mission Planner has basic and advanced tuning features. A copter with unacceptable oscillations or vibrations is set up for failure.
This short article is the tip of the safety iceberg which will hopefully motivate you to conduct further research and use preventive actions for optimizing safe flights. Much of it is only common sense, but often a slight detail can be missed resulting in a critical situation.
A CASE IN SAFETY
Zipline : Exemplary for safe flights
Safety features employed in their flight operations include:
- Computer vision for pre-flight check
- Contact with flight authorities
- Redundant motors, power, comm, nav
- Parachute landing backup
- Frangible design – break on contact
REFERENCES AND CREDITS
- https://aviassist.com.au/safe-flying-unsafe-drone-tech/
- https://www.heliguy.com/blogs/posts/unsafe-drone-flying-who-to-tell-and-what-the-rules-are
- https://www.remoteflyer.com/drone-crash-what-to-do-now/
- https://www.youtube.com/watch?v=s3iML1HgVGI
- https://3dinsider.com/drone-crashes-and-flyaways/
- https://www.youtube.com/watch?v=q78jN-_1zr8
- https://www.youtube.com/watch?v=QTnBm3rXmss
TAKE THE QUIZ
- Risk is –
- An injury to a person.
- A broken motor.
- The probability that I lose radio control and it causes injury.
- A copter flying BVLOS.
- Failsafe includes –
- RTL in the event of power loss.
- Manually landing your drone.
- A failure of a motor.
- My FAA certification.
- True or False: I should carry a fire extinguisher at all flights.
- Flying with a loose motor is an example of:
- A hazard.
- A risk.
- A hazardous situation.
- A failure mode.
- True or False: You are responsible for your actions.
- A safety setting to your autopilot might include:
- Bricking.
- Profiling.
- Leashing.
- Fencing.
- True or False: FMEA is something that could harm your copter.
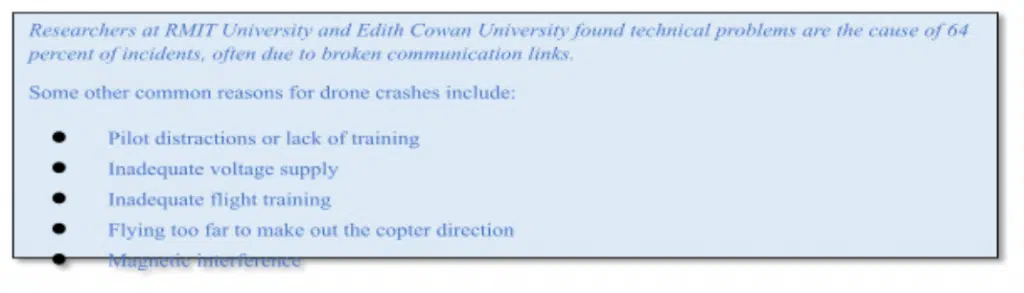
- One university study reported the most common reason for multirotor crashes is:
- Bird strikes.
- Motor oscillations.
- Loss of communication.
- Loss of power.
- One way to ensure ‘safe code’ is:
- Simulation.
- Using a better compiler.
- Using a kill function.
- Use open source.
- One method Zipline uses to ensure safe flights is:
- Breakaway wings
- Plastic motors
- Payloads of less than 2 pounds
- On board loudspeakers.
Answers:
