
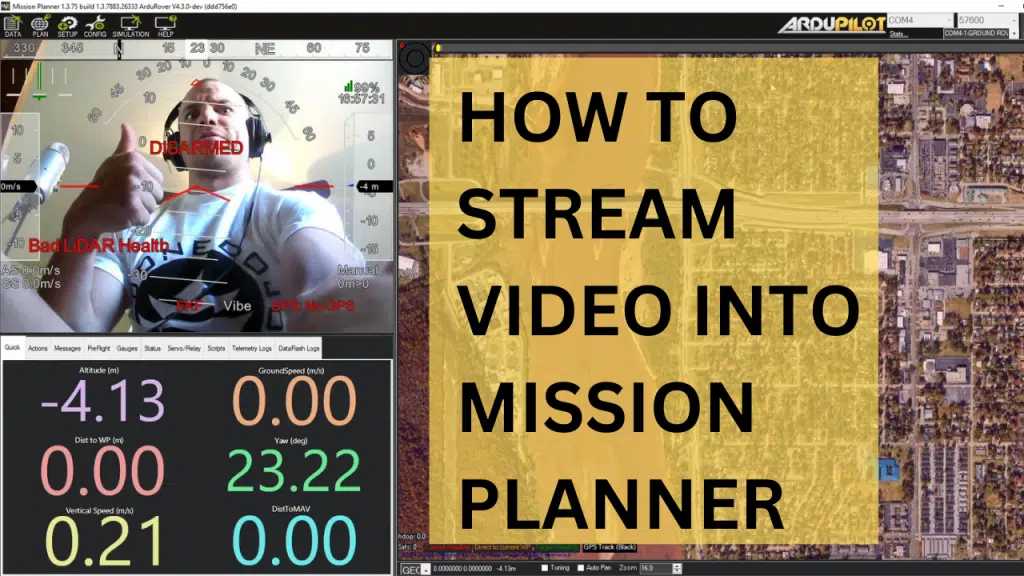




If you have a camera on your robot, you can actually stream that into MissionPlanner for a FPV perspective. Learn how to do that in 10 minutes in this project!
Precision landing for drones is a proven technology, but what about precision parking for rovers? Learn how to autonomously and consistently park your rover on an Aruco Marker.
Learn how to control your rover through voice commands by setting up a voice assistant that can run scripts, tell you your IP address, or anything else you tell it to do!
Want to control your drone from 1,000 miles away? Well, you can with this guide, where you’ll set your PiHawk drone up with 4G and unlock applications with infinite range.
There you are, with your drone/rover out in the field away from your house (and internet) ready to test out a new mission. One problem, you have no internet! Solve this problem in this project with mobile hotspots.
You’ve seen them, drones performing autonomous missions indoors, somehow without GPS! How is this done? Primarily with a GPS alternative called optical flow which can work indoors.