


Drone Flips On Takeoff? Do This To Fix It.
Author: Jack Douglas
It is inevitable that as a new multicopter builder, the beloved drone in which you invested so much time and money will flip over on takeoff. Argh!! But don’t get flipped out! Every problem presents a possible learning experience. In this blog, we will look at the issues that can lead up to this unfortunate event.
There are a number of reasons that can cause your drone to flip upon takeoff. Simply put, a flip normally occurs when there is a thrust imbalance, making the copter incapable of level flight. Thrust is developed by the propeller control surfaces, so anything compromising this will affect flight.
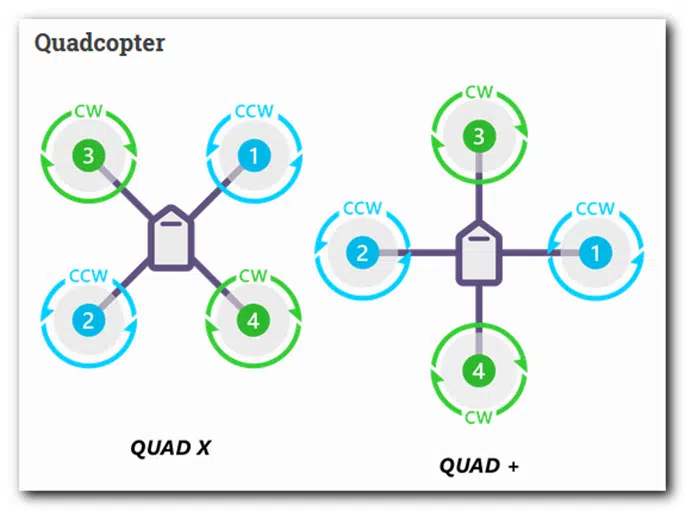
Common reason #1: Wrong motor and/or prop placement. Each copter design requires the specific placement of either clockwise (CW) or counterclosewise (CCW) motors. These motor types differ by the type of shaft that accommodates either CW or CCW props. Proper motor placement is illustrated by maps for each design type. Improper placement of a motor or/and propeller is almost guaranteed to cause a flip.
Common reason #2: Wrong frame selection. The initial setup of frame class and type in a Ground Control Station (GCS) must also be carefully selected. Choosing a Hexacopter when you are building a Quad-X can lead to a flip.
Common reason #3: Wrong motor wiring to the esc. Securing the motor wires to the esc will occasionally be incorrect, resulting in opposite motor spin. This is easily corrected by switching any two wires of a motor.
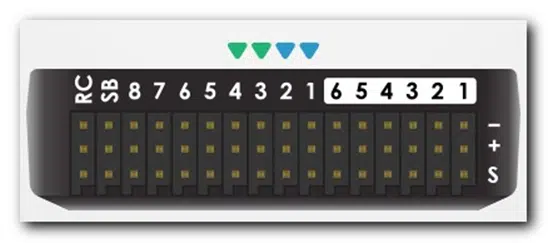
Common reason #4: Wrong esc signal wire to the flight controller. Placing the esc wire in the wrong servo slot or in the wrong orientation will be a problem. For example, in the Pixhawk the ground (-) wire is up and the signal (s) down. An easy trick to avoid a mix-up is to place one dot for motor 1, two dots for motor 2, etc on each esc wire.
Common reason #5: Esc’s not calibrated. This is a critical step, yet a common cause of improper motor spinning. Esc calibration is easily accomplished using various methods, including with Mission Planner (SETUP>Mandatory Hardware).
At this point, the Mission Planner ‘Motor Test’ (SETUP>Optional Hardware) offers a convenient method to check if each motor is spinning properly. Power the drone with a charged battery and connect with telemetry to run through the options.

Common reason #6: Vehicle not calibrated. Calibration of the accelerometer, compass and radio is critical. Failure to do this could results in a flip. Often compass calibration must be repeated out in the field as well. If other remedies don’t work, relash the firmware and run through all the calibrations.
Common reason #7: Bad esc or motor. Often seen with cheap brands, this can be avoided using reliable products.
Other causes of a flip include:
- Incorrect orientaiton of the flight controller on the vehicle, eg, backwards.
- Bad flight controller.
- Incorrect firmware loaded.
- Compass not placed correctly.
- Transmitter not calibrated, configured, or used incorrectly, eg, RC AETR mapped wrong, throttled to roll, etc.
- Vehicle caught by ground obstruction, eg, leg caught in grass.
- Asymmetrical weight loading; offset center of mass.
- Motor not secure
- Motor mount screws penetrating into motor
- Debris in motor
- Prop not secure or damaged
- Incompatibilities of motor, esc and propeller.
- Poor PID settings
- Dronekit coding issue, eg, takeoff with improper attitude control
- Wind gust
Other things you can do:
Despite a careful review of the above considerations, occasionally a takeoff issue can be difficult to assess. Some methods to use include:
- Use Mission Planner ‘Alt-A’ for initial tuning. This will provide a good first estimate which can be updated with other tuning methods.
- Review crash logs to gain insight. Looking at the motor output could reveal what is not operating as expected. [https://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html]
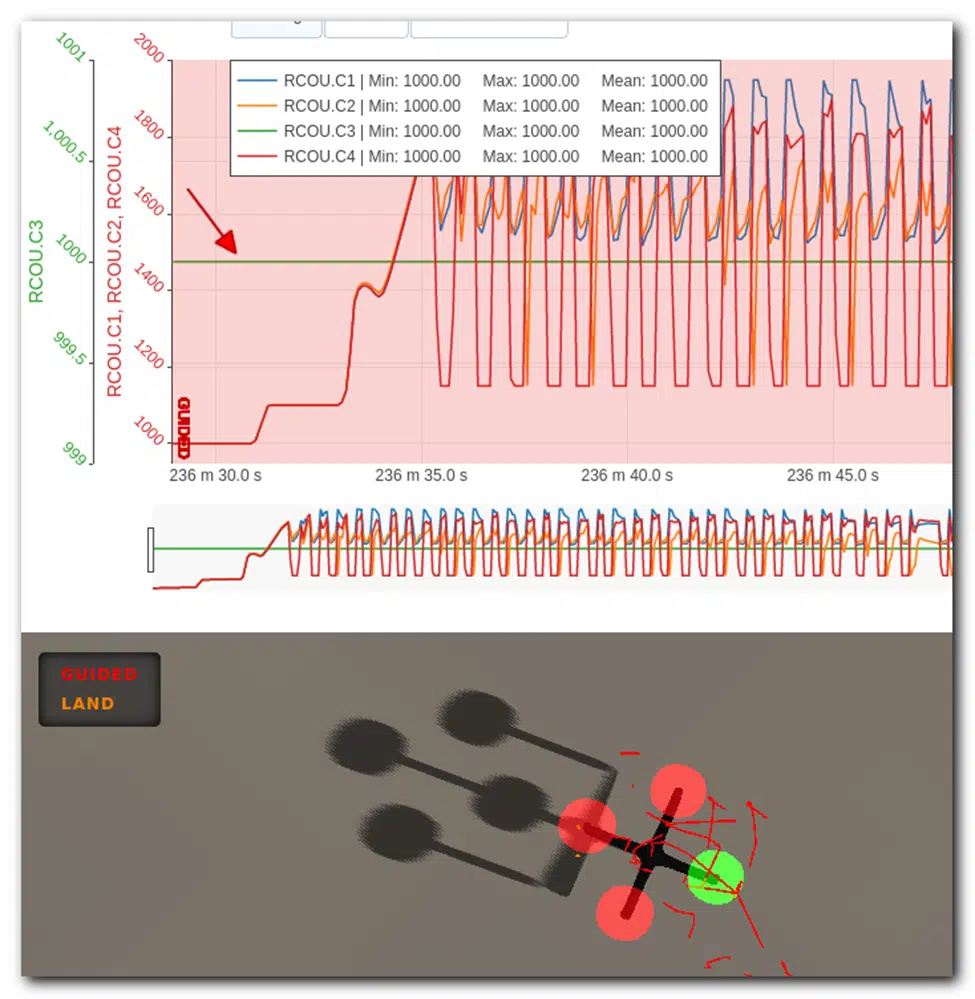
Use the Mission Planner Tuning feature to evaluate the drone. Under DATA check the bottom Tuning box. This can be used while running the Mission Planner Motor Test to see if there is a signal when a motor is not moving.

Hopefully this brief tutorial will provide some insights and tools to help you avoid those sometimes-costly crashes. Argh!!