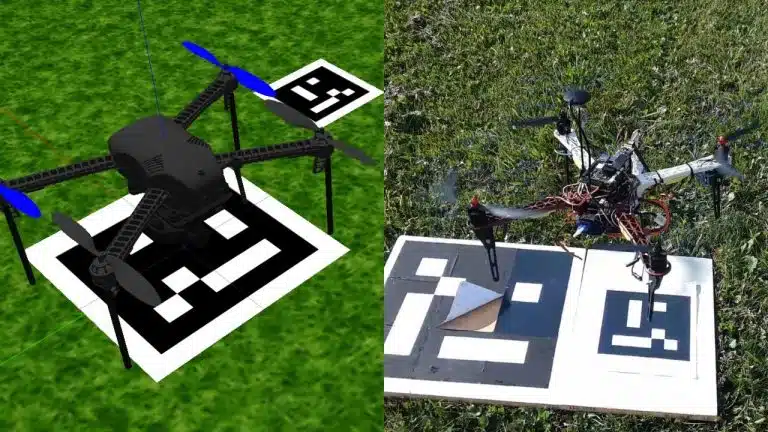
Gazebo Drone | Advanced ArduPilot SITL Simulation
If you don’t know already, SITL drones are a very powerful tool in the drone development space. Basically they are simulated drones that run right on your computer. A basic SITL instance can be spun up in both ArduPilot and PX4, and provide robust testing capabilities right out of the box. However, some drone applications…