
Connect Drone To MissionPlanner Via Internet Only (OPTIONAL)
It is possible that having 20 telemetry modules plugged in at once on 20 different drones in a small area could cause some data connectivity issues.
If this is true, then there is another way we can connect our drone to MissionPlanner.. through the internet!
1. Log into your Raspberry Pi via SSH with PuTTy
2. On your desktop computer, go to the search bar and type “cmd”
3. Click on “cmd” then type “ipconfig” and hit enter
4. Make note of the IP address under “Wireless LAN adapter Wi-Fi”
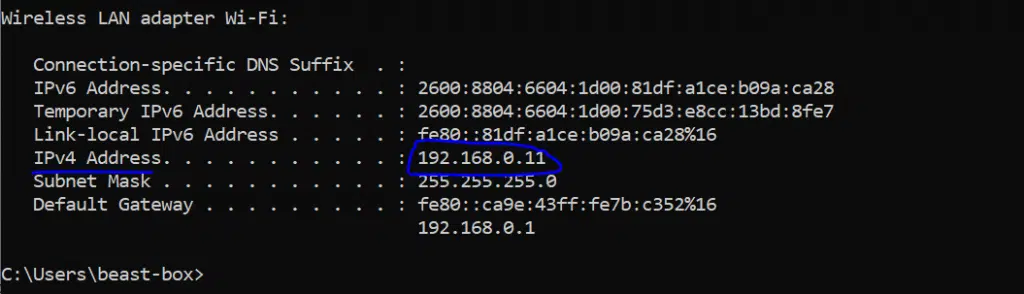
So the IP address of my desktop running MissionPlanner is 192.168.0.11
5. Now lets hop back to the Raspberry Pi SSH session.
We’re going to use something called “mavproxy” that allows the Raspberry Pi to connect with the Pixhawk flight controller.
Type this and hit enter:
mavproxy.py –master=”/dev/ttyAMA0″
Remember the connector we used to bridge the pixhawk to the raspberry pi with UART?
Well this device is called /dev/ttyAMA0 so this is how we access that UART bridge.

6. To prove we have a connection to the drone flight controller, let’s change the flight mode. Type the following:
mode guided
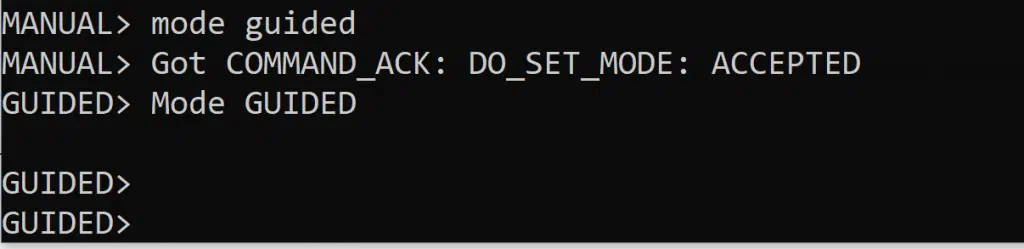
If the flight mode changes to GUIDED, you have a successful connection.
7. Hit CTRL+C to exit out of the mavproxy session.
8. Now we’re going to start mavproxy a different way. We’re going to copy telemetry data to the IP address of our computer running MissionPlanner. Remember the IP address you got on step 4? We’re using that now.
Start mavproxy like this
sudo mavproxy.py –master=”/dev/ttyAMA0″ –out 192.168.0.11:14550
The only thing you will change is 192.168.0.11 to your IP address of your desktop.
Hit enter
9. Now open MissionPlanner. It may already be connected to your drone (if Altitude is changing on the home screen you’re connected).
If it isn’t connected go to the top right of MissionPlanner, and select UDP from the drop down and click connect
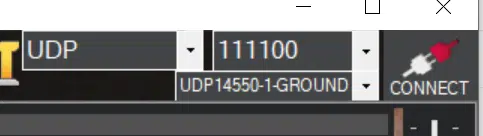
Enter in 14550 as the port number that MissionPlanner should be listening on and hit OK
You have now connected your MissionPlanner to the drone with the internet!