
Pre-flight Safety Checklist (IMPORTANT!)
Flying drones can be dangerous if you are not prepared. Follow this checklist before each flight to ensure you are prepared.
1. Power on the drone and wait for green LED on the info LED of the pixhawk
2. Connect drone to MissionPlanner
3. If the pixhawk LED is yellow, diagnose the reason by going to the Messages tab in MissionPlanner
If the pixhawk LED is blue, just take your drone outside and wait.
4. Make sure you are familiar with the flight modes that are active.
Ensure the last flight mode on your flight mode knob is set to “LAND” or “RTL”

Then you can switch to emergency LAND or RTL quickly by rotating flight mode knob all the way to the right
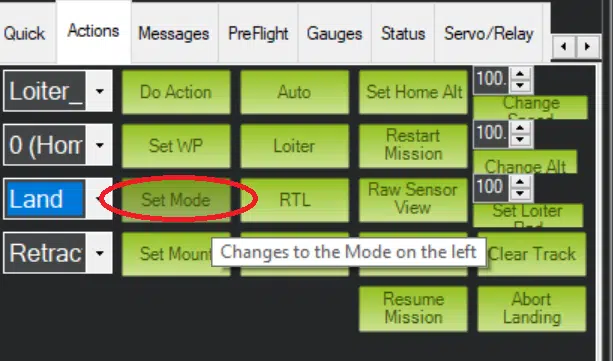
5. In MissionPlanner, to go “Actions” tab.
In the dropdown, select “LAND”.

In case of emergency and the drone is flying away, click “SET MODE” which will trigger the drone to land.
6. Place drone a safe distance away from the pilot.
Press the safety switch
Arm the drone by holding the left stick down and to the right for a few seconds.
7. Once armed, do not raise throttle. Ensure all motors are spinning.
8. You are clear to takeoff.
9. If at any point the drone becomes unresponsive and flies away, rotate flight mode knob all the way to the right to trigger “LAND” mode.
If this is unresponsive, click “SET MODE” in MissionPlanner to set mode to LAND through telemetry.
10. Once you are done with the mission, land the drone and disarm the motors by holding left stick down and to the left.
For autonomous missions with scripting, it is HIGHLY recommended to tie the drone to a 5lb weight with string, that way if the drone tries to fly away it will be anchored to the ground. This practice is called “leashing”